Diseño de propulsor UUV contemporáneo


Desde el punto de vista de la física de propulsión de vehículos, un vehículo subacuático no tripulado (UUV) es un poco diferente de su barco de esquí personal o de un petrolero. Comparte el modelo del sistema Vessel-Propulsor-Drive, que permite a un Propulsor convertir la energía de Drive en empuje con el propósito de mover un Vessel. Los principios básicos del equilibrio de empuje y el movimiento son comunes a los tres, al igual que la traducción de la energía de rotación en empuje axial por el elemento central del sistema: el Propulsor.
Los diferentes tipos de vehículos no comparten las limitaciones y los objetivos de diseño que son exclusivos de la misión de cada vehículo. Por ejemplo, un barco de esquí puede necesitar un alto empuje a velocidades de remolque y está dispuesto a renunciar a la velocidad máxima potencial para lograr este requisito de misión. Su relación de transmisión y las características de la hélice están diseñadas para este propósito. Un petrolero puede necesitar su mayor eficiencia a la "velocidad del negocio" para obtener el mayor rendimiento financiero. O también puede tener una restricción para las emisiones o la reducción de combustible, lo que requiere un compromiso en el diseño de la hélice.
Los vehículos subacuáticos tienen su propio conjunto de requisitos de diseño de propulsores relacionados con sus diversas misiones, como la vida útil de la batería (o la mayor distancia recorrida para el presupuesto de la batería), el diámetro máximo del cuerpo, la velocidad operativa mínima, la consideración de cubiertas o boquillas para la eficiencia hidrodinámica o la seguridad. Contacto con la hélice o reducción del ruido para garantizar un funcionamiento silencioso para la recopilación de datos. Este es el escenario de nuestro trabajo de diseño de propulsores UUV en HydroComp, y comienza con una entrevista con el cliente para recopilar la información realmente importante para un proyecto de diseño exitoso. El modelo Vessel-Propulsor-Drive es un buen marco para tales discusiones.
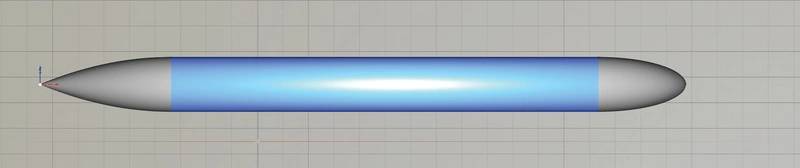
Buque
El UUV típico es una forma de casco de cuerpo de revolución (también llamada forma axi-simétrica) que tiene una nariz, un cuerpo y una cola. En aras del máximo volumen interno para el equipo, algunos vehículos tienen una nariz y una cola muy cortas. Como es de esperar, existe una cierta penalización de arrastre para una nariz roma y una penalización de propulsión para el flujo en el propulsor que no es axial sino a lo largo de una pendiente pronunciada. Parte de nuestro trabajo es equilibrar las diferentes partes de la resistencia (generación de ondas o resistencia a la presión versus resistencia friccional o viscosa) para obtener el menor resultado de resistencia al volumen. En realidad, eso no es completamente cierto. Realmente queremos un menor resultado de potencia a volumen, y la geometría de la cola influirá en gran medida en la capacidad del propulsor para desarrollar un empuje axial útil a partir de la energía de rotación.
Por lo tanto, muchos proyectos de diseño de propulsores comienzan con la predicción de los coeficientes de arrastre y de propulsión del casco (fracción de estela y deducción de empuje) utilizando el software NavCad® para la simulación de sistemas hidrodinámicos y de propulsión. Un módulo de vehículo sumergible específico proporciona capacidades de predicción sólidas para formas de casco UUV tipo torpedo.
 De archivo: Impulsión de Hydrocomp
De archivo: Impulsión de Hydrocomp
En el otro lado del Propulsor está el Accionamiento, que normalmente será un motor eléctrico. Los motores varían en las características eléctricas, pero los datos críticos para el diseño del propulsor son su curva de potencia-RPM de salida mecánica en el eje. La potencia de entrada eléctrica "corriente arriba" es importante, por supuesto, y proporciona una restricción operativa. Caracterizamos la potencia eléctrica de entrada con la curva de eficiencia del motor, que ayuda a responder la pregunta: ¿cuál es nuestro rango óptimo de RPM objetivo si la vida útil de la batería es la máxima prioridad? Por otro lado, es la curva de RPM de potencia del eje la que nos indica las RPM para la máxima potencia posible del eje y, por extensión, las RPM para el máximo empuje del propulsor y la velocidad del vehículo.
Como se puede ver en las curvas representativas del motor de la potencia del eje y la eficiencia eléctrica en comparación con las RPM, la potencia potencial más alta rara vez (si alguna) ocurre con la mayor eficiencia de entrada eléctrica. Por lo tanto, a menudo tenemos que definir el punto de diseño de RPM como un compromiso que no proporciona una mayor potencia de salida ni la mejor eficiencia eléctrica.
También es relevante para cualquier discusión sobre UUV impulsados por motor que las RPM del eje sean casi siempre demasiado altas para el funcionamiento óptimo del propulsor. No es raro ver algún tipo de engranaje para lograr el mejor rendimiento del propulsor, o aceptar que el propulsor pueda estar operando con una eficiencia mediocre.
Propulsor
Notará el uso del término "propulsor" en lugar de "hélice". Esto es para reforzar el concepto de que una boquilla y una hélice (como se encuentran en la mayoría de los UUV y, a menudo, denominados "propulsores" del vehículo) es una unidad interactiva, el Propulsor. El diseño del propulsor es una combinación de encontrar la mejor hélice y boquilla (también llamada conducto o cubierta) a la vez que se realiza un seguimiento de su interacción. En otras palabras, debe utilizar herramientas de diseño que incluyan esta interacción, como NavCad para el modelado de sistemas o PropElements® para el diseño de componentes de la boquilla de la hélice.
En todos los proyectos de diseño de propulsores UUV, un objetivo universal es desarrollar una geometría que genere la relación de empuje a potencia más alta (su eficiencia), que logramos utilizando prácticas bien establecidas. En general, la influencia de los controladores de diseño externos puede hacer que el diseño del propulsor UUV sea tan desafiante. Por ejemplo, el RPM puede ser demasiado alto (como se indicó anteriormente). Las restricciones geométricas pueden limitar el diámetro máximo (para garantizar que permanezca dentro del diámetro del cuerpo) o pueden influir en el diseño para tener en cuenta la pendiente de la cola del vehículo.
Es importante tomarse un momento y mencionar las implicaciones de la fabricación de propulsores UUV. Existe una discusión sustancial en la prensa sobre la fabricación aditiva (AM) para hélices. Si bien esto puede ser atractivo desde el punto de vista financiero y de entrega, debemos tener cuidado de que el rendimiento no se vea afectado por la textura de la superficie inadecuada (que puede tener una gran influencia para el propulsor del tamaño pequeño que se encuentra en la mayoría de los UUV), las fallas de resistencia a la fatiga o por Flexión hidroelástica en la cuchilla. HydroComp ha desarrollado prácticas exitosas para el uso de AM para pequeños propulsores a través de una variedad de proyectos de investigación internos.
Más allá de estas consideraciones prácticas de diseño, uno de los impulsores de diseño contemporáneo más interesantes es el tema del ruido radiado. Como parte de una iniciativa de sostenibilidad más amplia, HydroComp ha desarrollado experiencia en la predicción y mitigación de la hidroacústica propulsora (el término que captura el ruido y la vibración). Este conocimiento también se pone a disposición de otros arquitectos e ingenieros navales a medida que se desarrollan nuevas características hidroacústicas para nuestras herramientas. La sensibilidad de un proyecto al ruido ahora es siempre parte de la discusión con nuestros clientes de ingeniería de diseño de propulsores UUV.
Toda la excitación hidroacústica es de la fluctuación de la masa (el movimiento periódico de la masa del fluido). La hidroacústica impulsada por propulsores generalmente es causada por variaciones en las zonas de baja presión de la hélice a medida que gira dentro y fuera de las regiones "sombreadas", como detrás de un puntal o una aleta de control. Parte de la fluctuación es simplemente el cambio en la dirección del flujo alrededor de la cuchilla causado por la entrada variable, pero más significativamente por la rápida expansión y el colapso de la cavitación en la cuchilla. Cada uno de estos se evalúa como parte de nuestro diseño de propulsor, con la mitigación necesaria según los cambios en el contorno de una pala y su distribución de inclinación de inclinación.
La excitación hidroacústica excesiva y la transmisión también se pueden ayudar con un diseño creativo de la boquilla. Al utilizar nuestro fondo en el modelado de desempeño de boquillas, podemos considerar si una geometría particular de boquillas silenciosas puede ofrecer la supresión necesaria, así como cualquier pérdida de eficiencia del propulsor.
Entonces, si bien el diseño del propulsor UUV tiene su colección de desafíos únicos, es solo una tarea de componente dentro de un problema de sistema más grande. Puede ofrecer un desafío de ingeniería satisfactorio, uno que se puede completar con éxito con un poco de cuidado, herramientas adecuadas y experiencia práctica.
Sobre el Autor
 Donald MacPherson, el autor.
Donald MacPherson, el autor.
Donald MacPherson, un especialista líder en simulación de sistemas de propulsión, es el Director Técnico de HydroComp, donde supervisa todos los servicios de ingeniería y desarrollo de software. Graduado del Instituto Webb, es miembro de SNAME y miembro de su Panel de Hidrodinámica de Propulsión.
La Marina de EE. UU. cancela cuatro fragatas Constellation y mantiene las dos primeras bajo un nuevo acuerdo
")
HMM realiza un pedido de 1.460 millones de dólares para ocho portacontenedores ultragrandes a HD Hyundai
")
Oficial jefe de transporte de ganado acusado en redada de cocaína

Golden Gate selecciona un astillero para un pedido de ocho buques
, un catamarán diésel capaz de alcanzar velocidades de hasta 40 nudos. El barco, de diseño australiano, fue el tercero de una serie construida para SFBF en el astillero Mavrik y fue galardonado con el premio \"Gran Barco de 2025\" de la revista Marine News. Imagen cortesía del astillero MAVRIK.")
Stena Futura: Entregado el ferry de carga preparado para metanol

Star Bulk registra un tercer trimestre más flojo y amplía su flota con nuevos Kamsarmax.

La NTSB señala que un cable suelto provocó un apagón en el barco que sufrió el accidente en el puente de Baltimore en 2024.

La adquisición consolida el sector europeo de buques de cabotaje

AET encarga dos buques de doble combustible de GNL a SHI.

McDonald nombrado presidente y director ejecutivo de ABS

El número de muertos asciende a 21 mientras Malasia busca a los rohingya desaparecidos.
-165325 "(Crédito: Agencia de Control Marítimo de Malasia)")
El número de muertos asciende a 11 en la tragedia del barco rohingya frente a las costas de Malasia; decenas de personas siguen desaparecidas.
-165305 "(Crédito: Agencia de Control Marítimo de Malasia)")